鱼眼相机标定校正+批量加载多张标定图像+批量处理多张测试图像+角点坐标输出+相机参数输出
”鱼眼相机标定 视场 批量处理图像 角点坐标输出 相机参数输出“ 的搜索结果
11643用于鱼眼图像校正的薛珠存,薛南,夏桂松,沈伟明武汉大学,武汉,430079{朱村.薛,薛楠,桂松.夏,沈雯}@ whu.edu.cn摘要提出了一... 介绍鱼眼相机由于其大视场(FOV)而被广泛用于许多计算机视觉任务[31,34,9
FishEyeRecNet:基于多上下文协同深度网络的鱼眼图像校正尹小青1,2,王新潮3,俞军4,张茂军2,傅福亚5,陶大成11UBTECH Sydney AI Center,SIT,FEIT,悉尼大学,澳大利亚,2国防科技大学、3史蒂文斯理工学院4杭州...

最近的多视图立体方法已经取得了令人满意的尽管取得了一定的进展,但由于常规图像的视场有限,重建大型室内环境仍然需要采集大量具有足够分辨率的图像。有效的视觉重叠,这是相当劳动密集型的。360◦图像覆盖比常规...
第139期 视觉论文速览 --深度点云网络,新模块新结构 --场景文字放大 --RGB-D传感器校正 --基于平面注意力的场景重建 --三维匹配描述子的测评
接收日期:2016年1月15日接收日期:2017年2017年2月8日接受关键词:PAPARA(ZZ)I图像注释WoRMS底栖巨型动物密度分布组成丰度a b st ra ctPAPARA(ZZ)I是一个轻量级的和直观的图像注释程序开发的底栖巨型动物的研究...
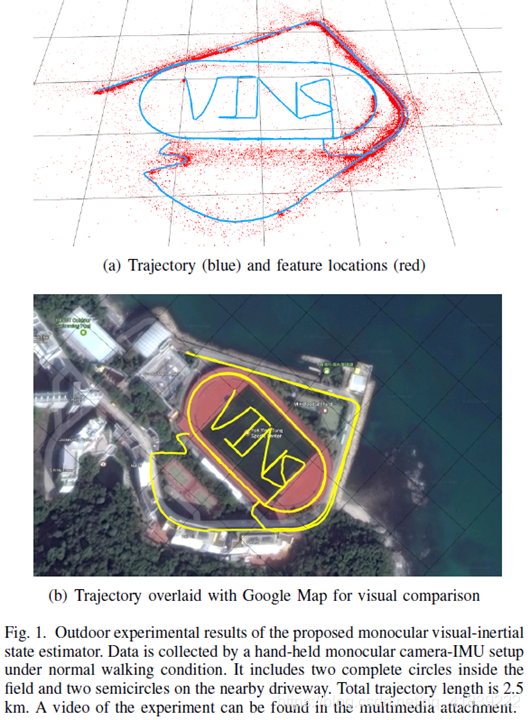
VINS-Mono论文翻译
标签: 自动驾驶

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达文章导读 本文针对自动驾驶行业的视觉感知做简要介绍,从传感器端的对比,到数据的采集标注,进而对感知算法进行分析,给出各个模块的难点和解...
自动驾驶的视觉感知包括哪些内容@[TOC](自动驾驶的视觉感知包括哪些内容) Reference:1. Introduction2. Sensor Component3. Camera Calibration4. Data Annotation5. Functional Division**5.1 目标检测跟踪****5.2 ...

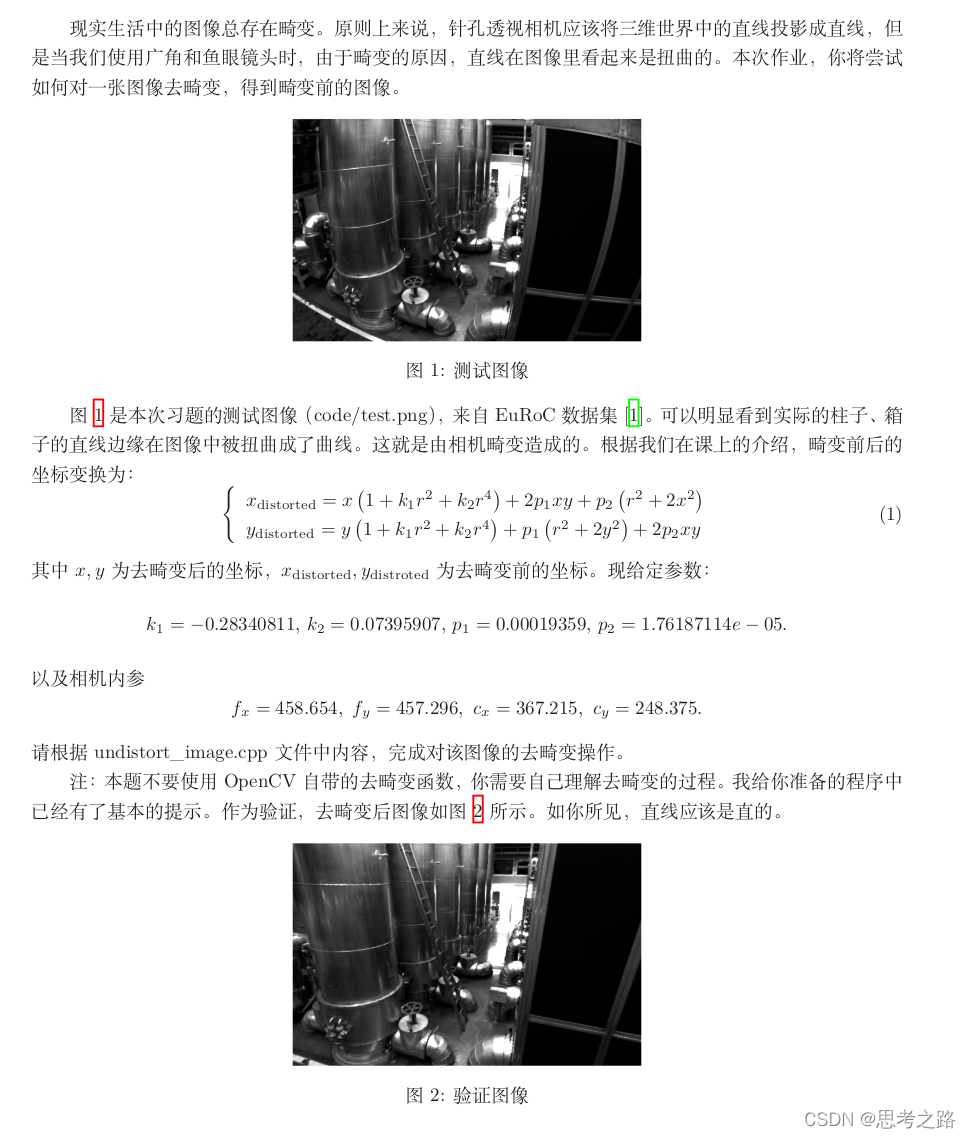
深蓝-视觉slam-第四节习题
标签: slam
8797CityFlow:一个城市规模的多目标多摄像机车辆跟踪和重新识别郑唐1米林德·纳普哈德2刘明宇2杨晓东2斯坦·伯奇菲尔德2王硕2拉特纳什·库马尔2大卫·阿纳斯塔西乌3黄仁能11华盛顿大学2NVIDIA3圣何塞州立大学摘要...


[9]GPS_GLONASS组合精密单点定位研究.pdf [13]基于星间距离变化的动态双向时间同步算法.pdf [17]QZSS对GPS区域性能增强分析.pdf [21]GPS模糊度降相关LLL算法的一种改进.pdf [25]2008年汶川地震前的形变异常及机理解....
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地